Arduino. Подключение шагового двигателя 28BYJ к Arduino
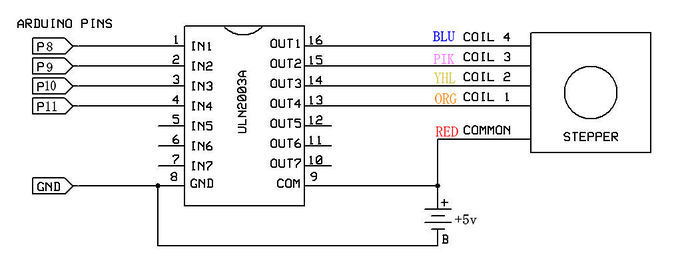
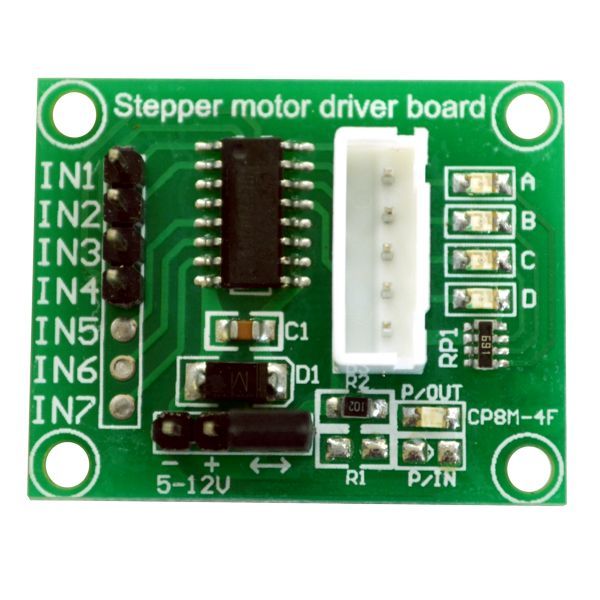
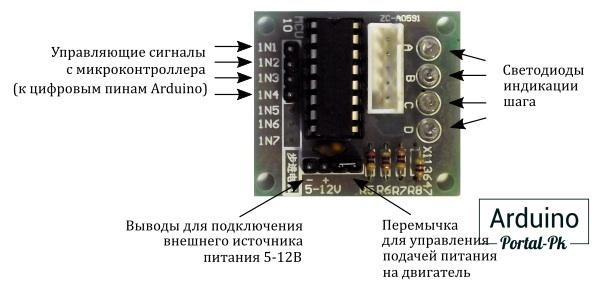
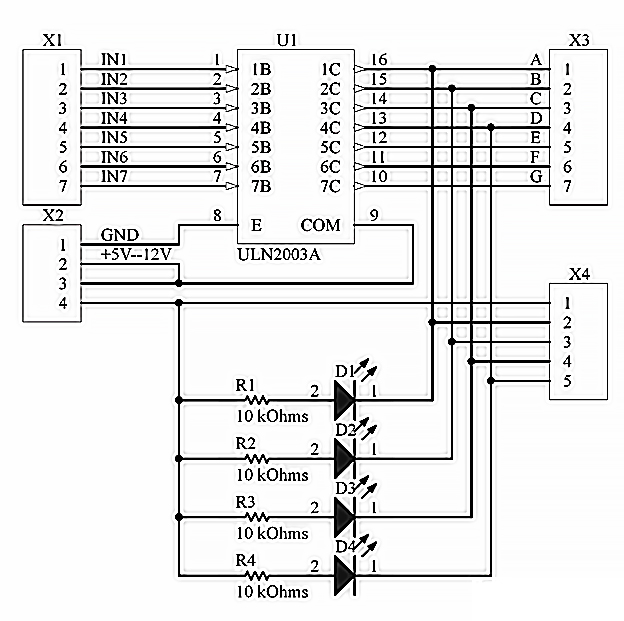
Двуполярные A Однополярные ULN Драйвер шагового двигателя модуль ULN Назначение разъема X1 IN1.











Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах. Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах, принтерах, роботах-манипуляторах. Шаговые двигатели преобразуют электрические импульсы в перемещение вала на определенный угол. Минимально возможный угол перемещения шагового двигателя, называется шагом.





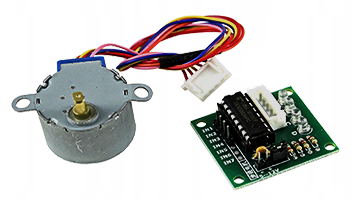
![Пример Шаговый двигатель и драйвер ULN [База знаний]](https://data.outofbox.ru/static/i/kn1/3236/wm/private/products/e2/a4/e2a4c3d3abc4a0b6c1060552e82557cb.jpg)
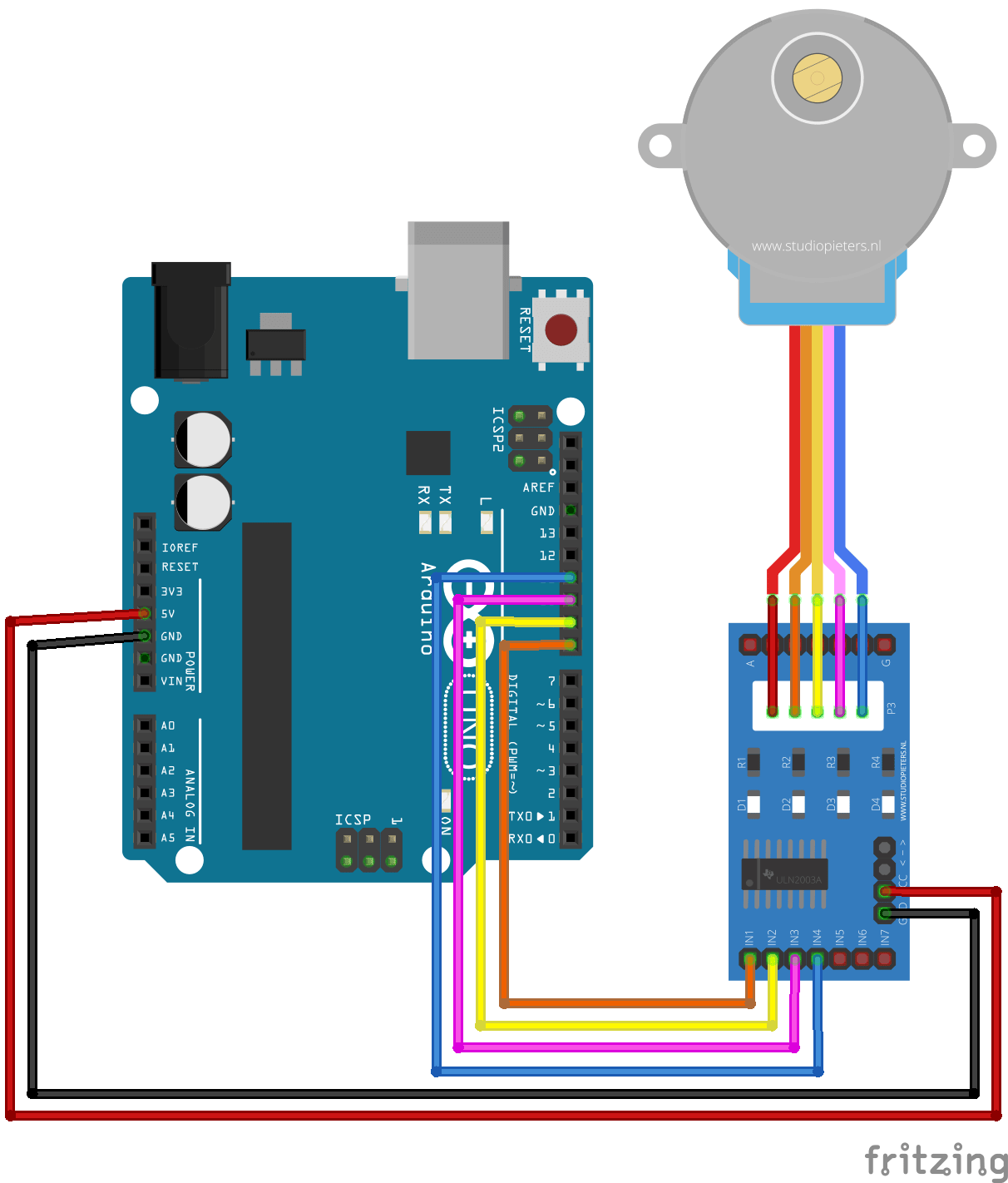
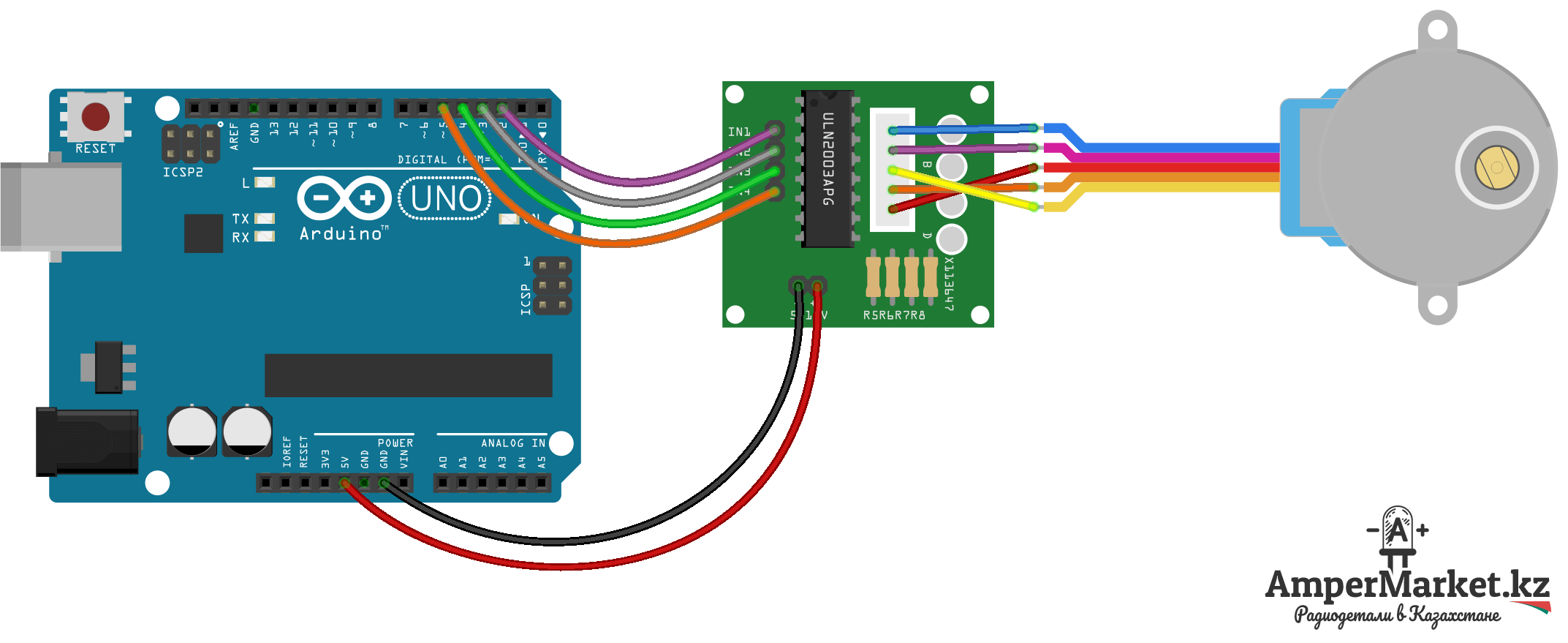
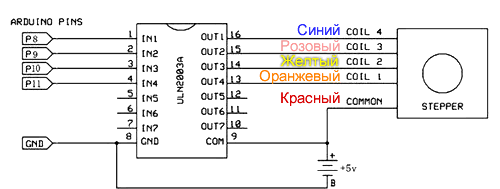
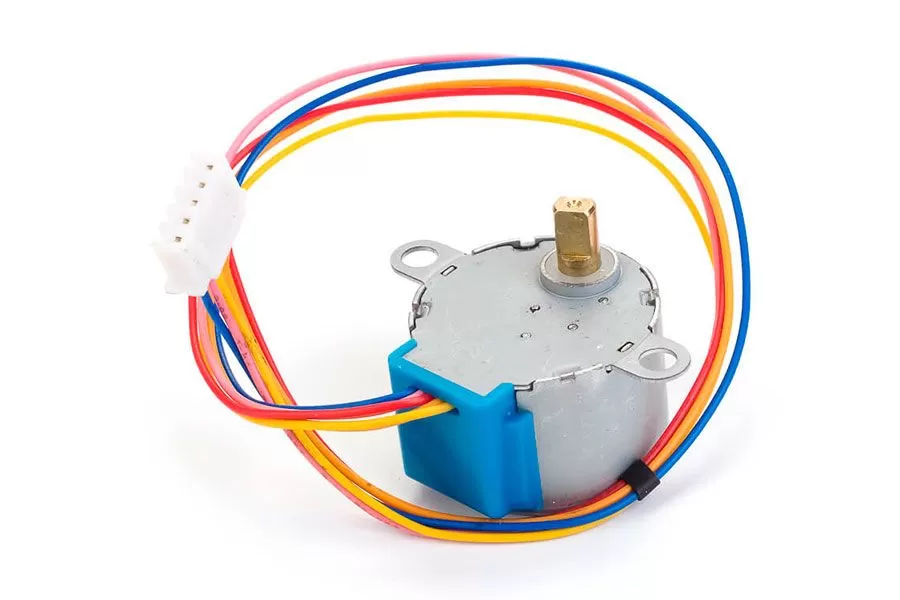
В статье мы подробно разберем принцип работы шагового двигателя 28BYJV , особенности и подключение драйвера на базе микросхемы ULN Дискретное перемещение вала двигателя 28BYJV позволяет повернуть вал ровно на 60 или градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.